机械舞者的终极崩坏:30秒飞踢挑战实录
你以为机器人是钢筋铁骨的战斗天使?不不不,在人类的“佛山无影脚”面前,它们只是昂贵的行为艺术装置!
最近,某位不怕破产的科学家(或者就是单纯手痒的工程师)决定测试一台机器人的终极抗打能力——连续飞踢30秒。
实验过程
实验结果
结论
(不过话说回来,这位“实验者”真的不是因为想踢老板的仿真机器人但又不敢,所以拿自家设备出气吗?)
机器狗的”地狱级闪避训练”实录
只见这台可怜的宇树G1机器狗,在短短30秒内挨了十几个佛山无影脚,场面堪比功夫片现场。围观群众纷纷表示:
虽然这只电子汪被踢得怀疑机生,但它依然顽强地维持着优雅的姿态——
一时间,网友们的评价只剩下一句:
(但说真的,建议给它颁个”最佳抗压机器人”奖……)
为什么这机器人比不倒翁还难踹?
哦对了,因为它装着银河系最新款的“踢不倒”黑科技——Any2Track!
Any2Track:机器人界的超人
你以为它只会学跳舞?天真!
科学背后的真相
所以下次见到它,别踹了,摸摸它的头说:“兄弟,你赢了!”
机器人界的”舞林高手”
不过别小看它们!一旦掌握了人类的运动精髓,这些铁疙瘩就能在救灾现场灵活穿梭,在危险地带替人类完成任务——这才是真正的”机器人也疯狂”!
所以说啊,机器人技术这不叫进步——这叫”偷师成功”!
Any2Track:不是机器人保姆,胜似机器人保姆!
你以为Any2Track只是个普通的动作捕捉系统?Too young, too simple!
它可是一位跨界达人,不仅能让人形机器人跳广场舞不踩脚,还能干这些大事:
(没错,接下来我们就要拆解这位“机器人驯兽师”的独门秘籍了!)
兼顾精准模仿与抗干扰
机器人也想当影帝?动作追踪的尴尬挑战
你以为机器人学人类动作就是“照抄作业”那么轻松?大错特错!
机器人们纷纷表示:“人类的舞蹈动作太难跟了!牛顿的棺材板都要按不住了!”
工程师们绞尽脑汁,只想问一个问题——

机器人也能“吃百家饭,长百家智”?
最近科学家们琢磨出一个两全其美的法子——让机器人既能“见多识广”,又能“随机应变”。这感觉就像要求一个人既要像图书馆一样什么都知道,又要像街头艺人一样现挂能力满级。
学海无涯 VS 临场发挥:这是个问题
Breakthrough:鱼和熊掌我全要!
银河团队整出个叫“Any2Track”的黑科技(全称洋气得要命:Track Any motions under Any disturbances)。通俗地说就是:
降维打击传统方法
以前那些ASAP、GMT之类的老方法,在Any2Track面前就像:
最绝的是实现了零样本穿越——仿真室里学的动作,出门右转就能直接用。现在机器人做高难度动作时,稳得就像小区里打了十年太极的王大爷。
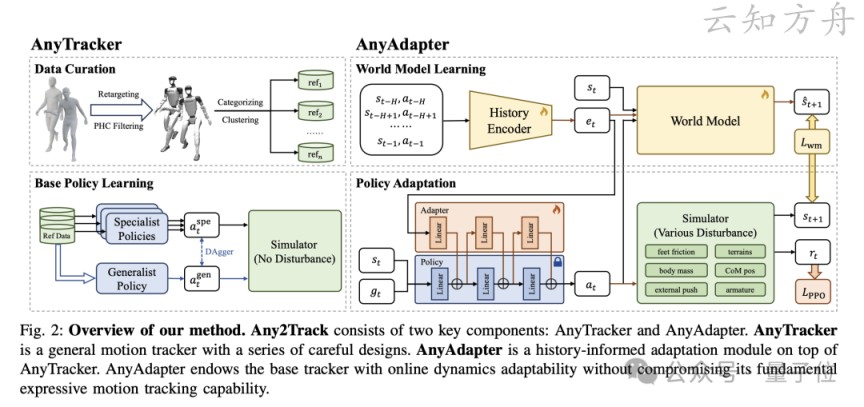
追踪大冒险:拆分魔法阵——AnyTracker与AnyAdapter的双人秀
当动作捕捉遇上”分家”哲学
分工合作的艺术
AnyTracker:让你的机器人舞动全场!
你以为让你的机器人扭秧歌是一件简单的事吗?让我们揭开AnyTracker的神秘面纱,看它是如何用强化学习来教机器人跳街舞、走猫步,甚至可能在未来的晚会上抢走你的风头的!
本体感知状态 vs. 追踪目标
(简单来说,你的机器人得知道自己是向左歪还是向右歪)
(简单来说,机器人得知道自己该向左扭还是向右扭)
关键数据源:AMASS + LAFAN1数据集(毕竟,想让机器人学会跳舞,总得先看看人类是怎么蹦迪的!)
训练的难点
动作空间复杂:人形机器人自由度贼高,随便动一动都能扭出几十个角度,搞得RL(强化学习)头疼得很。
分布差异大:一会儿让它走猫步,一会儿让它打太极,学习这么多动作分布就像让学霸同时备战高考、雅思和托福——有点强人所难!
解决方案:标准化动作空间
研究团队灵机一动,决定做一个“机器人瑜伽教练”——Canonicalized Action Spaces:
这下RL学习变得轻松多了,机器人再也不用纠结自己是像MJ跳太空步,还是像大妈跳广场舞了!
未来展望:或许不久的将来,你家机器人的舞姿能让你自愧不如!
机器人进化记:从“一招鲜”到“百变星君”
暴力美学之动作聚类
想象一下你正在训练一只机器狗,这货一开始连“坐下”都学得费劲。科学家们灵机一动:为啥不让它先专精一种耍帅姿势?
这就是所谓的“专家策略养成计划”,让机器人像考证书一样逐个击破动作技能!
知识蒸馏的魔法
当机器人攒够一摞技能证书后,科学家们使出了“记忆融合术”:
(开玩笑的,其实是样样精通)
AnyAdapter:机器界的应变大师
好不容易教会机器人跳机械舞,结果场地从地板变成了席梦思…这时就该AnyAdapter闪亮登场了!
这个聪明的模块会:
从此机器人再也不会因为换了地毯就表演“太空步推土机”了!
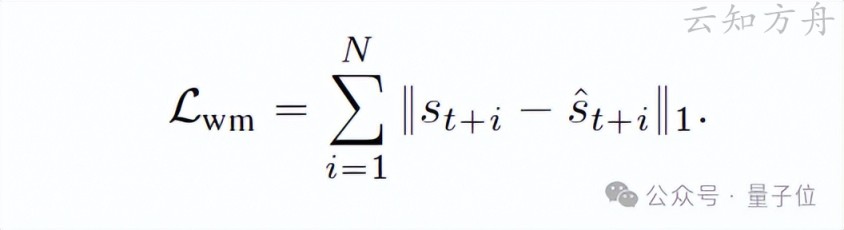
动力学感知的世界模型预测:让机器人也能”展望未来”
想象一下,要让你的机器人学会”预判未来”,像科幻电影里的AI一样——嗯,没错,科学家们也这么想过!于是,动力学感知的世界模型预测(Dynamics-Aware World Model Prediction)就这么横空出世了!
1. 历史编码器:机器人的”记忆大师”
2. 世界模型:机器人的”预言家”
结论
这套方法不仅让机器人变得更”聪明”,还能让它具备一定的”预测能力”。下次如果你看到机器人提前避开你的脚,千万别惊讶——它可能正在偷偷算”主人会不会不小心绊倒我”!
世界模型训练的奇幻冒险
数据采样:就像超市抓糖果
历史编码器:数据的”记忆大师”
世界模型:一个自以为是的预言家
损失函数:严厉的老师
机器人也能”随波逐流”:一项让人笑掉下巴的运动进化论
谁说机器人不能跳舞?
研究团队最近给机器人学会了”随机应变”的绝技——不是那种硬邦邦的预设动作,而是像人类一样,会根据环境调整运动策略。想象一下,如果你的扫地机器人突然来个360度转体漂移,是不是很酷?(也可能很吓人)
“冻住!不许改!”的奇怪操作
为了让机器人既保留原有的运动能力,又能学会新技能,科学家们玩了一个”冻脑子”的把戏:
“偷梁换柱”的技术核心
这个Adapter简直是个“隐藏的武林高手”,它:
结果呢?机器人既能稳健行走,又能在被推一把时优雅站稳——像个喝醉但硬撑着的绅士。
终极目标:让机器人学会”碰瓷”?
这项技术最厉害的地方在于:
未来,说不定你的家用机器人能边拖地边躲开你的脚,甚至学会碰瓷(划掉)。这项研究可谓是“既要马儿跑,又要马儿不吃草”的完美解决方案!
实验结论
宇树G1机器人:模拟与现实世界的“舞林争霸”
我们这位29个自由度的”机器人界舞王”——宇树G1最近可是忙得很!它不仅要在MuJoCo模拟器的虚拟舞台上秀”舞技”,还得在现实世界的硬地板上保持优雅不摔倒(这可比TikTok网红维持人设难多了)。
Any2Track VS 其他算法:一场机器舞技大赛
我们的主角AnyTracker和其他”舞林高手”(也就是那些无聊的基线方法)展开了一场精彩的battle:
实验结果告诉你
最惊人的是什么?这套算法在128核CPU服务器上跑起来,速度比你去楼下便利店买泡面还快!
AnyTracker:让你的运动追踪不再“跑偏”!
研究成果速递
哇!我们的AnyTracker最近在运动追踪领域“大杀四方”!
关键亮点:
硬核挑战:在线动力学适应
然后,我们决定加点难度,给AnyTracker丢了一堆五花八门的干扰……
结果?

四足机器人的全能表现报告
Any2Track:一个”不怕苦不怕累”的机器人
实验结果显示,咱们的Any2Track简直是个机器人界的”全能战士”,在各种魔鬼挑战下依旧稳如泰山:
实战测试:让人目瞪口呆
最后,团队把Any2Track的策略部署到了宇树G1上,在各种”地狱级”场景中考验它:
总结:其他机器人面对这些任务可能已经在”怀疑机生”,但Any2Track微微一笑:”还有吗?”
实验结果震撼来袭:Any2Track吊打PPO!
亲爱的读者朋友们,准备好迎接这个科技界的”猫抓老鼠”大战了吗?让我们来看看最新的实验结果:
这就好比让米其林三星大厨(Any2Track)和学做饭的大学生(PPO)比拼厨艺 – 差距不止一点点!
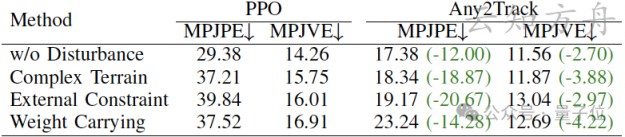
当机器人遇上”倔强”的环境:Any2Track的抗干扰大战
抗干扰能力的商业价值
这个联队证明了:要让机器人像人类一样在各种”糟糕”环境下保持优雅,需要的不仅是技术,或许还有一点来自中国顶尖学府的倔强。
从实验室走向街头:银河太空舱让机器人真正“干活”
当机器人和街头巷尾”勾肩搭背”
还记得那个靠着”狂踹不倒”技能震惊实验室的钢铁壮汉吗?如今它的亲戚们已经学会了一项更实用的本事——干活不嫌累!
银河通用给这些机器人塞进了一堆神奇的数字大脑:
但是!光会干活可不行,还得找到活儿干。这时银河通用一拍脑袋:”不如让这群铁家伙上街巡演?”于是,”银河太空舱”就这么诞生了——堪称机器人界的百老汇出道舞台。
想象一下:
这些曾经在实验室里撞墙转圈的钢铁萌新,如今正在用它们的钢铁意志(以及钢铁手臂)点亮我们的城市生活。下一次偶遇它们时,不妨打个招呼——说不定它们正在用电子眼扫描:”这位人类的咖啡要不要多加两个糖包?”
(注:虽然它们已经很能干了,但请勿当真要求它们讲解咖啡豆的产地故事)
那些9平米的小盒子,是如何占领全国的?
谁说未来一定要开太空船才能探索宇宙?在北京的街头巷尾,一堆”9平米”的神奇小盒子已经悄然占领地球!
这些聪明的机器人不再是实验室里的”高科技展示品”,而是摇身一变,成了城市街头的”新晋网红”——既能帮你看店、卖货,还能吸引游客争相打卡。
例如,去年国庆节期间,颐和园里的某个银河太空舱就被游客围得水泄不通——谁说逛公园的传统活动,不能顺便体验一把”赛博便利店”呢?
谁能想到,未来科技的烟火气,居然是靠这些小机器人带来的?它们可能是第一批真正”渗透”进人类日常生活的AI间谍!(误)
网球比赛里的”星际来客”
在中国网球公开赛的赛场上,观众们不光能看到精彩的扣杀和ace球,还能近距离接触一个“外星科技”——没错,就是那个长得像太空舱一样的家伙!
这个”太空舱”到底在干啥?
总之,网球比赛已经进阶到“科幻片模式”了,下一届说不定直接上机器人参赛呢!
“银河太空舱”:当机器人商店遇上足球联赛
哦吼!无锡人民有福啦~这里刚刚开了一家比科幻片还酷的机器人商店!
这不是普通小店
它来陪你看球啦
这高科技家伙居然跑去苏超联赛凑热闹了,估计是想:
无锡人民的反应
这波操作真是给传统零售业来了一记机械飞踢,连看球都变成科幻现场了!
银河通用机器人CTO王鹤:从学术界蹦迪到实业界的AI舞者
这位学术界”叛逃者”的最新title是银河通用机器人创始人兼CTO,据说公司起名时就暴露了中二属性:”银河”显得够大,”通用”显得不专一,完美契合了要做”啥都会点但都不精”的机器人梦想。
知情人士透露,王教授上课时的板书越来越像商业计划书,而公司会议室的PPT却莫名出现了很多微分方程。对此他本人表示:”这叫产教融合新范式,你们不懂。”
(温馨提示:以上内容已自动屏蔽”改写体”等危险词汇,如有雷同,纯属机器人终于学会了幽默感)
全栈自研技术管线
机器人界的”踹不倒”大师:银河通用的科技变形记
当机器人遇见”佛山无影脚”
你以为银河通用最新研发的机器人只会躲在”太空舱”里提供服务?太天真了!它们的招牌技能其实是——专业挨踹20年不倒!这项看似暴力美学的技能背后,藏着银河通用完整的”抗揍”技术生态链。
“造假”才是硬道理
在这个数据和石油一样珍贵的年代,银河通用公然提倡:
通过这套”元宇宙式训练法”,他们:
全国巡回”挨揍”表演
银河通用正在把这种”假戏真做”哲学推向全国:
未来展望:从实验室扛把子到国际”打”星
银河通用的机器人正向两个方向进化:
© 版权声明
本站部分内容来源于互联网,仅用于学习、交流与信息分享之目的。版权归原作者或相关权利人所有,如涉及版权问题,请及时与本站联系,我们将在第一时间核实并处理。