
“腿脚利索”的AI?腾讯Tairos:七年”机器人训练营”终于开班啦!
当AI学会”搬砖”:揭秘腾讯的具身智能开放平台
7月27日这个黄道吉日,腾讯突然宣布:”我家AI不光会写诗画画,现在还能帮你搬砖了!”——隆重推出具身智能开放平台Tairos。这可不是普通的AI工具箱,而是个自带大模型、开发工具和数据服务的“机器人保姆套餐”,专门用来喂饱那些嗷嗷待哺的具身智能项目。
腾讯的”七年机器人训练营”
为什么突然搞开放?张博士的三大灵魂拷问
发布会后,腾讯首席科学家张正友博士(江湖人称”机器人教父”)接受采访时,给出了三个比哲学命题还深刻的回答:
行业影响:从此AI不光会聊天,还会帮你拿外卖?
端到端 vs 分层:
为什么说分层架构是当下更务实的路径
具身智能:大脑与小脑的奇妙双人舞
1. “分层”还是”端到端”?这是个问题
想象一下,你面前有两台智能体:
理论上,如果端到端少年能吞下无穷无尽的数据,那他迟早也会自发学会分层,就像你的大脑最终学会了骑车、打字、甚至边走路边玩手机(别告诉我你没干过)。
但问题是——哪有那么多数据?端到端少年的训练成本堪比养一只”吃数据的饕餮”,而分层架构老哥则灵活得多:”不用那么累,我这里已经整理好了任务清单。”
所以,分层不是”最优”,而是聪明的妥协。
2. “小脑”的秘密:犯了错千万别让”大脑”知道?
在人类身上,”小脑”负责让你走路不摔跤,”大脑”负责思考”今晚吃啥”。而在智能系统里,SLAP³架构也是这么玩的:
角色分工
有趣的是,”小脑”会偷偷犯错——比如有一次它以为快速握住杯子的正确方式是捏扁它,结果水洒了一地。但它很快调整了自己的”肌肉记忆”,而这个经验如果特别有用,就会被悄悄打包交给”大脑”存档,下次遇到类似情况,”大哥”就不会犯同样的错误。
3. 边界是死的?不,它们也在”谈恋爱”
分层架构的边界不是铁板一块,而是动态变化的协作关系:
未来,”左脑”和”右脑”的界限可能越来越模糊,就像人类的大脑——当你熟练掌握了某项技能(比如骑自行车),你的”思考”就会退居二线,变成下意识的肌肉控制。
总结:分层架构,一场”分工合作”的艺术
现在的分层架构,说到底是一种高效的学习策略,因为它:
未来的智能体或许能完全”端到端”,但现在嘛……还是先让”小脑”好好练练抓杯子吧!
(P.S. 如果你的AI在家摔碎了杯子,别怪它——它可能正在努力学习”人类式优雅握杯”呢!)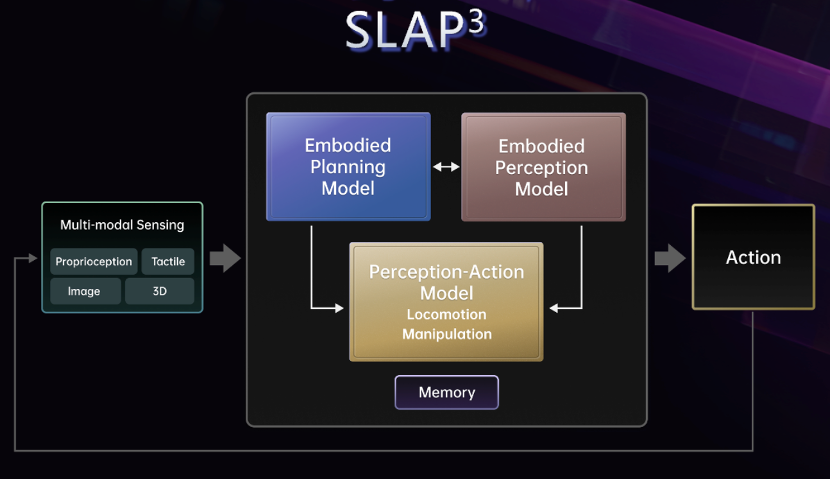
当机器人学会”记仇”:腾讯SLAP³体系的奇妙进化论
一、”机器人也是会记仇的”
腾讯 Robotics X 实验室的最新成果 SLAP³ 体系,让机器人不仅会做事,还会记仇——没错,我说的就是那个在厨房里不小心把杯子摔碎的尴尬瞬间。
这样一来,机器人不仅能干活,还会“吃一堑长一智”,下次可能还会吐槽人类:”主人,你怎么又把杯子放这么边缘?”
二、”今天聪明,明天可能变傻?”
张正友博士的SLAP³体系最有趣的一点是——它能自己吐槽自己! 今天的先验知识,明天可能就被证明是错的:
“上次还觉得塑料杯子不容易碎,结果摔了一下发现还是会裂开……好吧,更新一下认知。”就像Transformer模型,最初只是用于翻译,后来进化成了ChatGPT的神级架构。机器人也不可能一步登天,必须一步步“边犯错边升级”。
三、”动物不用语言,为啥人类偏要翻译?”
目前的AI有个问题——啥都要翻译成文字!
真正的具身智能应该像动物一样,直接用视觉、触觉、听觉学习,而不是拐弯抹角地翻译成人类的语言。
四、”为什么不直接‘梭哈’海量数据?”
有人问:”既然最终目标是海量数据训练的原生多模态模型,为啥不一步到位?”
张正友博士的回应很精妙:
“你想直接去火星?先学会回收火箭赚钱吧!”
不然就像让刚学走路的小孩直接参加马拉松——不摔死才怪!
所以,分层架构不是绕路,而是“边赚钱边搞大事”的科学策略!
五、总结:机器人也在”打怪升级”
腾讯SLAP³体系的精髓就是——
这不就是人类的成长过程吗?看来机器人不仅在学习如何做事,还在学习如何成长。
或许某天,AI看到人类犯错,会摇摇头说:
“又来了,这个错误我100年前就记录过了……”
为什么说「身脑融合」
是具身智能的第一性原理
科学家说:真正的机器人不能像”无头苍蝇”一样乱跑
最近科学家张正友在讨论”具身智能”时,提出了一些有趣的观点,让我们用更接地气的方式理解这个高大上的概念。
什么不是具身智能?
真正的具身智能=懂身体+懂环境+懂任务
它得像个武林高手一样,把”我要拿冠军”这种抽象目标,拆解成”跳板起跳→空中转体→落水水花消失”这种具体动作。换句话说,它不能光有”大脑”,还得真的懂怎么用”身体”配合。
人类VS机器人:跳水运动员的启示
不过最关键的是:跳之前的”心理模拟”。运动员站在跳板上的时候,不是发呆,而是在脑子里快速”播放”一遍动作流程——就像你在考试前疯狂脑补”待会儿怎么答题”一样。
机器人心里的”小电影”
有人问:”这种脑内模拟是不是就像视频生成AI?比如现在很火的Sora?”科学家表示:
终极结论
未来的机器人得学会两件事:
总之,真正的具身智能应该是——有自知之明的实干派,而不是只会幻想的艺术家。
喧嚣赛道上的创新定力:
为何要对商业化说「不」
疯狂科学家日记:AGI之路上的诱惑与坚守
今天又有人问我:”张博士,具身智能这么火,你们腾讯 Robotics X 为啥不赶紧变现啊?”
我扶了扶眼镜(其实我没眼镜,但科学家不扶眼镜显得不够专业),深沉地回答:”年轻人,你以为我不想吗?但科学家的定力,就像减肥时的炸鸡,闻着香,但要忍住啊!”
1. 人才和资本涌入:好事还是坏事?
我说:”朋友们,急着商业化可以理解,但别急着把‘智能垃圾桶’都贴上AGI标签啊!”
2. 商业化诱惑:科学家也扛不住
想象一下:
这种时候,”定力”就是你内心的小天使在呐喊:”别看眼前那几张钞票!想想星辰大海!”
3. 腾讯 Robotics X 的自我修养
我们实验室在过去7年里,做出了不少酷炫的玩意儿——比如能跳钢管舞的机械臂、会撒娇的AI狗。但我们忍住了!
为啥?因为一旦商业化,我们就会陷入以下恶性循环:
这就像你想减肥,结果天天被拉去吃火锅——最后不是发明了AGI,而是发明了”如何在PPT里吹牛”。
4. 真正的“陷阱”:短期利益 vs. 星辰大海
说白了,科学家的定力就是:
就像我常对团队说的:”兄弟们,咱们的目标是让机器人统治世界……哦不,是让机器人理解世界!不是让它们先学会推销保险!”
商业化不是坏事,但如果你真的想在AGI上搞点大事情,就得有”看着别人赚快钱,自己默默啃论文”的觉悟。
(本文灵感来源于机器之心采访,但经过疯狂科学家的奇幻脑补)
© 版权声明
本站部分内容来源于互联网,仅用于学习、交流与信息分享之目的。版权归原作者或相关权利人所有,如涉及版权问题,请及时与本站联系,我们将在第一时间核实并处理。
